Article of the Month -
July 2014
|
Performance of Real-Time Precise Point Positioning Using MADOCA-LEX
Augmentation Messages
Ken HARIMA, Suelynn CHOY, Yong LI, Thomas GRINTER,
Mohammad CHOUDHURY and Chris RIZOS, Australia
Yaka WAKABAYASHI and Kogure SATOSHI, Japan
1) This article is a peer
reviewed article presented at the FIG Congress 2014 in Kuala Lumpur,
Malaysia. The topic covers the Asian-Pacific area but is relevant and
important internationally as well. The Quasi-Zenith Satellite System
(QZSS) is a satellite-based augmentation system for the GPS, GLONASS and
Galileo constellations, transmitting navigation signals that are
compatible and interoperable with the Global Navigation Satellite
Systems (GNSS). The enhanced capacity allows augmentation messages aimed
at centimeter-level Precise Point Positioning (PPP) to be broadcasted
over the QZSS wide area of coverage.
ABSTRACT
The Quasi-Zenith Satellite System (QZSS) is a
Japanese regional satellite navigation system consisting of several QZSS
satellites in highly inclined elliptical orbits that allows it to cover
a wide area in East Asia and Oceania. QZSS is a satellite-based
augmentation system for the GPS, GLONASS and Galileo constellations,
transmitting navigation signals that are compatible and interoperable
with these Global Navigation Satellite Systems (GNSS). In addition to
the navigation signals, QZSS also transmits augmentation signals L1-SAIF
and L-band Experimental (LEX) Signal. The LEX signal is unique for QZSS
in that it is capable of delivering 2kbps (1695bps of effective bit
rate) of correction messages compared to the 250bps of legacy Satellite
based Augmentation Systems (SBAS) like the MTSAT Satellite-based
Augmentation System (MSAS). This enhanced capacity allows augmentation
messages aimed at centimeter-level Precise Point Positioning (PPP) to be
broadcasted over the QZSS wide area of coverage. One such message is the
Multi-GNSS Advanced Demonstration of Orbit and Clock Analysis (MADOCA)
based messages which are currently being broadcasted by the LEX signal.
The aim of this research was to evaluate the quality of the corrections
include the MADOCA messages and the performance of real-time PPP using
these augmentation messages. Centimeter-lever position accuracy was
obtained for static PPP after 2 hours of coonvergence and
decimeter-level accuracy was obtained for kinematic PPP after 1.5 hours
of coonvergence. This service is expected to become continuously
available for most of East Asia and Oceania region in 2018, when the
QZSS constellation gets enhanced to four satellites.
1. INTRODUCTION
GNSS Precise Point Positioning (PPP) has been an active research
topic as it is capable of delivering high accuracy (centimeter to
decimeter-level) point positioning solutions using a single GNSS
receiver, thereby eliminating the constraints of baseline length and
simultaneous observation at both rover and reference stations. This mode
of positioning technique is feasible in remote areas and regions of low
GNSS reference stations.
One of the caveats of PPP is the availability of precise satellite
orbits and clock corrections. These corrections need to be transmitted
to users and is critical for real-time applications. At present, these
corrections enabling PPP are available for free on the Internet. From a
practical viewpoint, the Internet and/or terrestrial broadcasting is not
a viable solution as it inherits telecommunication issues of such as;
connection issues, roaming charges, latency, standards and transmission
on different radio frequencies. Satellite broadcasting, on the other
hand, is a more preferred method. But this mode of communication link is
only available currently to users who are willing to pay.
The Quasi-Zenith Satellite System (QZSS) is a Japanese regional
satellite navigation system developed by the Japan Aerospace Exploration
Agency (JAXA). The aim of QZSS is to enhance the current availability
and performance of GNSS typically over Japan and region centered in the
135º E meridian. Besides transmitting conventional positioning signals,
QZSS also transmits augmentation signals to enhance the performance of
GNSS (Sawamura et. al., 2012). One of the QZSS augmentation signals,
i.e., the L-band experimental (LEX) signal, is designed to enable high
accuracy positioning in real-time and time transfers through
transmission of precise corrections. RTK like performance (3 cm
horizontal and 6 cm vertical RMS errors with time to first fix of 35
seconds) has already been reported for tests in Japan (Saito et. al.
2011).These messages are only valid in Japan and rely on regional
corrections that include ionospheric and tropospheric corrections.
Another type of correction messages with global validity are currently
being tested for high accuracy positioning. These messages are called
MADOCA-LEX messages. They currently include orbit and satellite clock
corrections, estimated User Range Accuracy (URA) and code biases for GPS
and QZSS satellites, allowing standard PPP to be performed within the
QZSS coverage area.
A recent agreement between the Cooperative Research Centre for
Spatial Information (CRCSI) and JAXA has made the LEX signal and
correction messages available for experimentation in Australia. Research
is currently ongoing with the aim to assess the capacity of the QZSS-LEX
signal to deliver a high accuracy real-time PPP service to the
Australian GNSS users. This paper evaluates the current MADOCA messages
both in terms of the quality of its orbit and clock corrections and the
quality of real-time PPP position estimates using these MADOCA-LEX
corrections.
This paper is structured in five sections. First, a brief description
of the Japanese QZSS system and the LEX signal is given in Section 2.
The structure of the MADOCA-LEX messages and the quality of its orbit
and clock corrections are described in Section 3. The experiment
settings and results of real-time PPP using MADOCA-LEX messages are
presented in Section 4; and finally, a summary of findings and plans for
future research are outline in Section 5.
2. QZSS AND LEX SIGNAL
QZSS is a Japanese regional satellite navigation system (when fully
deployed) consisting of several QZSS satellites placed in Highly
Inclined Elliptical Orbits (HEO) and Geocentric Orbits (GEO). The system
is designed so that at least one satellite is constantly located at a
high angle of elevation over Japan, thus the term ‘quasi-zenith’. Other
neighboring countries centered in the 135º E meridian are also able to
benefit from this regional navigation satellite system. JAXA
successfully launched the first QZSS satellite, ‘Michibiki’ (or QZS-1),
on 11 September 2010. JAXA declared QZS-1 user-ready in June 2011. Three
more satellites are commissioned to be launched by 2018 (Clark, 2013),
bringing the constellation to three HEO satellites and one GEO
satellite.
QZSS is intended as a regional augmentation system for GNSS, aimed at
enhancing the availability and the performance of GNSS based Positioning
Navigation and Timing (PNT). QZSS is a satellite-based augmentation
system (SBAS) for both GPS, GLONASS and Galileo. It is capable capable
of transmitting navigation signals, i.e., L1CA, L2C, L5, L1C, that are
compatible and interoperable with these GNSS. In addition to the
navigation signals, QZSS also transmits two augmentation signals, i.e.
L1-SAIF (Sub-meter class Augmentation with Integrity Function) and LEX.
The L1-SAIF signal is compatible with the SBAS system, which provides
sub-meter accuracy wide-area differential corrections as well as
integrity for safety of life services such as those utilized in the
aviation industry. The LEX signal, on the other hand, is specifically
designed to enable high accuracy real-time PPP and time transfers.
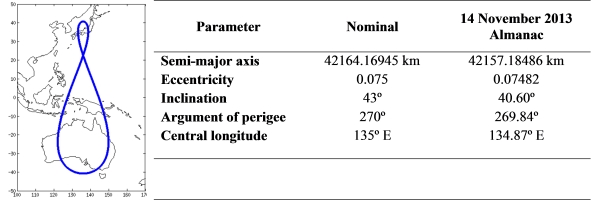
2.1 QZSS Satellite Orbit
In order to cover the East-Asia and Oceania region, the QZSS will
make use of HEO and GEO satellites. The first satellite, QZS-1 intended
to be used for system evaluation was launched in a HEO orbit. The orbit
parameters and ground track the of QZS-1 satellite are presented in
Table 1. The proposed two HEO satellites to be launched by 2018 are
expected to have the same ground track with eight hours of offset, i.e.
the same semi-major axis, eccentricity, inclination and perigee with
±120° offset in right ascension angle. All QZSS satellites have a mean
anomaly of 135° E central longitude. This orbit has good coverage over
East-Asia and Oceania region, with a high elevation at around 135° E
meridian and between 40° S and 40° N latitude.
Table 1. QZS-1 HEO parameters.
2.2 LEX Signal
The QZSS-LEX signal is an experimental performance enhancement signal
transmitted on 1278.5 MHz carrier, which has the same frequency as the
Galileo E6b signal. Numerous organizations, e.g., JAXA, Spatial
Positioning Research and Application Centre (SPAC), National Institute
of Information and Communications Technology (NICT), and Geospatial
Information Authority of Japan (GSI), are currently investigating and
evaluating the signal to support their own PNT applications (Kanzaki &
Noguchi, 2011). Figure 1 illustrates the navigation message modulation
for the LEX signal.
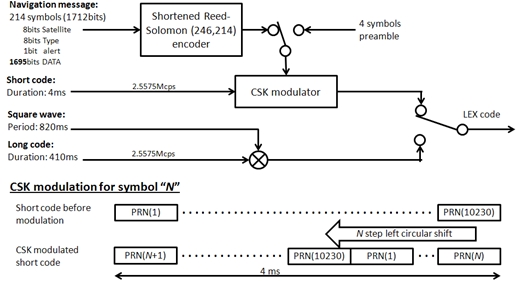
Figure 1. LEX signal code modulation (JAXA, 2013).
The LEX signal uses a Kasami series short code (2.5575 Mcps) with a
chip length of 10230 and a 4 ms period, and a Kasami series long code
(2.5575 Mcps) with a chip length of 1048575 and a 410 ms period. The
short code is modulated by the navigation message using a 256-ary Code
Shift Keying (CSK), which consists in replacing the short code with a
left circle shifted version of it, the number of steps to be shifted
representing the symbol value (JAXA, 2013).
The LEX navigation message is grouped in frames of 250 symbols which
are transmitted every second. 8 bits indicating the satellite
transmitting the message (193 for the QZS-1 and 194 to 196 for the next
three QZSS satellites), 8 bits indicating the type of message and an
alert flag of 1 bit are added to 1695 bits of data to form 214 symbols
of 8 bits each. The 214 symbols are encoded into 246 symbols using a
shortened Reed-Solomon code. Finally four preamble symbols i.e. “1A, CF,
FC, 1D” are added.
2.3 Coverage of the LEX signal
Most the factors governing the availability of the LEX receiver can
be considered either independent of the receiver geographical location
or to be highly correlated with the elevation of the satellite. The
probability of successfully decoding the CSK modulated LEX message, as a
function of the QZS-1 satellite elevation is shown in Figure 2. The
results were obtained from correspond to three days of observations
performed in Melbourne between March 8 and March 10 of 2013 (Choy et al.
2013). As shown in Figure 2, the LEX signal availability can be expected
to be over 90% when the QZS-1 satellite is above 40º of elevation.
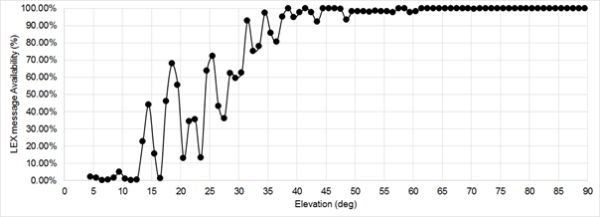
Figure 2. LEX message availability as a function of QZS-1
satellite elevation.
The left pot in Figure 3 shows the number of hours a day the QZS-1
satellite can be seen at more than 40º of elevation over the East-Asia
and Oceania region. The right plot in Figure 3 show the estimated number
of hours a day, at least one QZSS satellite will be over 40º of
elevation. The LEX signal can be expected to be available 24-hours a day
for most of the East-Asia and Oceania region by 2018 with three active
HEO satellites.
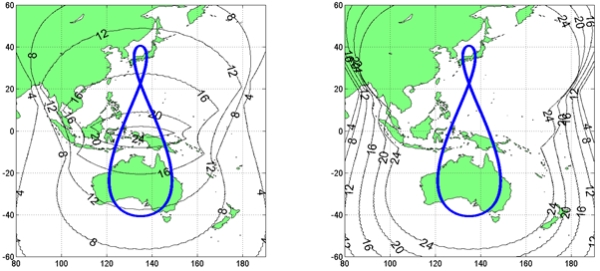
Figure 3. Current LEX message availability with one QZSS
satellite (left).
Expected LEX message availability with 3 active HEO satellites in 2018
(right).
3. MADOCA MESSAGES
As of April 2013, the LEX signal started to transmit precise orbits
and clock corrections generated from the MADOCA (Multi-GNSS Advanced
Demonstration tool for Orbit and Clock Analysis) software developed by
JAXA. The corrections included in these MADOCA-LEX messages have global
validity and thus can be used over the whole coverage region.
3.1 Coverage of the LEX signal
The MADOCA-LEX messages are coded within the 1695 bits of data
following a format derived from the RTCM 3.2 standard as illustrated in
Figure 4. Of the 1695 bits allocated for data, 33 bits are used to
transmit the time in which the LEX message is transmitted. The contents
of the RTCM 3.2 frame, with the exception of the header and parity check
bits, are allocated in the remaining 1662 bits.
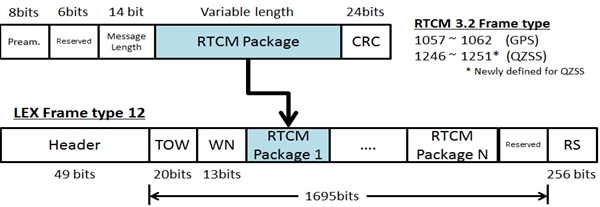
Figure 4. Data format of a MADOCA-LEX message.
Table 2 shows the type of corrections included in the MADOCA messages
and their update rates (as of November 2013). Currently the MADOCA
messages include orbits corrections, clock corrections, User Range
Accuracy (URA) and code bias for GPS satellites and orbit corrections,
clock corrections and URA for the QZS-1 satellite. Planned future
developments are the inclusion of GLONASS messages to allow multi-GNSS
PPP and phase bias messages messages to allow PPP Ambiguity Resolution
(PPP-AR).
Table 2. Update interval of
MADOCA-LEX products

Also a series of correction messages generated in Australia are in
development as a part of a research project based on an agreement
between CRCSI and JAXA, these messages are also expected to follow the
MADOCA-LEX structure.
3.2 Quality of MADOCA-LEX orbit and clock corrections
The quality of the precise orbits and clock corrections included in
the augmentation messages has a direct impact in the achievable accuracy
and convergence time of the PPP solutions. In this section we present
the quality of the orbit and clock corrections included in the
MADOCA-LEX messages. The orbit and clocks evaluated in this section were
calculated from MADOCA-LEX messages collected in Melbourne between
September 18 and September 20, 2013.
Table 3 shows the difference between the precise orbits and clock
corrections obtained using the MADOCA-LEX products and those obtained
from the IGS final products. These errors on radial, along and cross
track components of the GPS satellite orbits are shown in meters while
the clock correction errors are shown on nanoseconds. Errors of the
orbit and clock errors obtained from the IGS real-time stream from the
caster products.igs-ip.net (mountpoint CLK11). These products are
hereafter called IGS-RT and were collected alongside the MADOCA-LEX
products as a comparison.
Table 3. Orbit and clock errors
of MADOCA-LEX and IGS-RT products
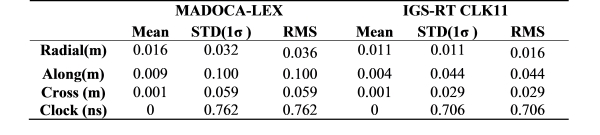
Figure 5 shows the time series for the difference between orbits and
clock corrections obtained using MADOCA-LEX products and those obtained
using IGS final products. The periods between 5:00 and 12:00 UTC in
which no results are presented corresponds to time periods were the
MADOCA-LEX messages could not be reliably decoded. This is because the
elevation of the QZS-1 satellite seem from Melbourne was too low
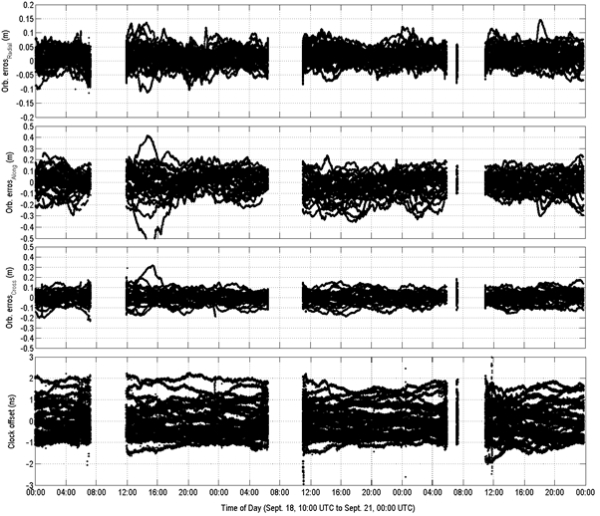
Figure 5. Orbit and clock errors for the real-time MADOCA-LEX
products: Radial (top) 0.036 m RMS, Along track (second) 0.1 m RMS,
Cross track (third) 0.059 m RMS, Clock (forth) 0.76 ns RMS
The orbit errors of the MADOCA-LEX products were about as twice as
large as those obtained from the IGS-RT stream for the measured period.
However, the contribution of the orbit errors in the Signal–in-Space
Range Error (SISRE) was less than 0.050 m (0.043 m for MADOCA-LEX, 0.019
m for IGS-RT). This made the clock error, equivalent to 0.229 m for
MADOCA-LEX and 0.212 m for IGS-RT, the dominant factor in determining
the SISRE. As a consequence, the SISRE can be expected to differ in less
than 10%. For the case of the RJAP station, described in Section 4.1,
the measured SISRE was 0.226 m for MADOCA-LEX and 0.216 m for IGS-RT.
4. REAL-TIME PPP USING MADOCA
The MADOCA-LEX products were evaluated for real-time PPP in different
conditions. In the present paper we present two fixed point tests and a
vehicle test. The fixed point tests consist on a static-PPP test
performed on August 1, 2013 and a kinematic-PPP test performed between
September 18 and September 20, 2013. The vehicle test was performed on
October 23, 2013. All positioning solutions were generated using RTKLIB
software (Takasu & Yasuda, 2009), and were GPS-only solutions. The
observables for the test were obtained using a surveying grade GNSS
receiver and the MADOCA-LEX corrections were obtained using an
independent receiver. IGS-RT products, used as a benchmark for the
MADOCA-LEX test were streamed using mobile broadband router connected to
a cellular network.
4.1 Fixed Point Tests
The fixed point tests described in this section were performed GNSS
reference station (station ID: RJAP) near Melbourne, Australia. The
ITRF08 coordinates of RJAP station, obtained from the NRCAN PPP service
are presented in Table 4. The GNSS receiver, i.e. a Javad DELTA-G3T was
connected to the Javad GrAnt-G3T antenna shown in Figure 6.
Table 4. ITRF08 coordinates of
RJAP station on 27 February 2013.

The LEX antenna, i.e. a G5Ant-2A4MNS1 from ANTCOM (ANTCOM 2010), was
also mounted on another of the pillars, as depicted in Figure 6. The LEX
messages were demodulated and decoded by a software receiver named LEX
Message Streamer from Lighthouse Technology and Consulting Co. Ltd.
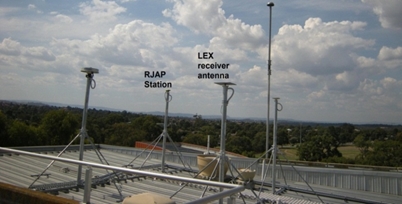
Figure 6. RJAP station at RMIT Bundoora campus.
For the static station test, real-time position estimates were
computed using static PPP and kinematic PPP algorithms and compared to
the coordinates in Table 4,
4.1.1 Static PPP test
The static test presented in this section was performed from 05:30
UTC to 23:30 UTC on August 1, 2013. The mean, standard deviation (STD)
and RMS error of the static PPP using MADOCA-LEX corrections are
presented in Table 5. The position errors were computed with respect to
the ‘known’ coordinates of RJAP. Static PPP results using IGS-RT
products are also presented for comparison.
Table 5. Positioning errors for
static PPP (after 2 hours of convergence)

The results in Table 5 are calculated without taking into account the
first 2 hours to give time for the PPP solution to converge. The
3-dimensional RMS error for PPP using MADOCA-LEX solutions was 0.041m,
which is about 25% larger than the case where IGS-RT products were used.
The time series for the first 12 hours of the static tests is shown in
Figure 7, MADOCA-LEX solutions are shown in blue, IGS-RT solutions are
shown in green. Two hours is an appropriate convergence time for the PPP
solutions in the test.
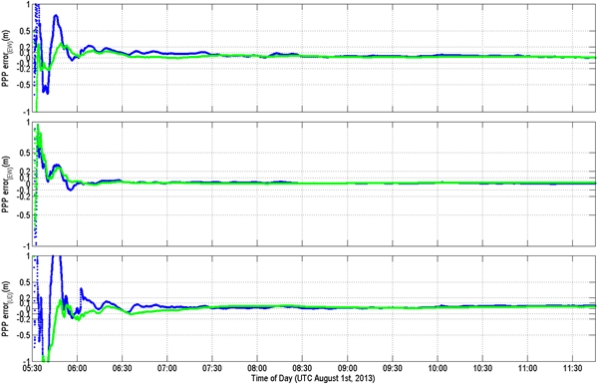
Figure 7. Performance of static PPP using MADOCA-LEX products
(Blue) and IGS-RT products CLK11 (Green). RMS errors were E/N/U:
0.029m/0.012m/ 0.026m for MADOCA-LEX.
E/N/U: 0.019cm/0.017cm/0.024cm for IGS-RT.
4.1.2 Kinematic PPP test
The kinematic tests presented in this section were performed from
September 17 to September 22, 2013. A total of 8 tests ranging from 3 to
9 hours were performed. The mean, STD and RMS error of the kinematic PPP
using MADOCA-LEX corrections are presented in Table 6. Equivalent
statistics for kinematic PPP using IGS-RT products are also presented
for comparison. A total of 11 tests ranging from 3 to 9 hours were
performed.
Table 6. Positioning errors for
kinematic PPP (after 2 hours of convergence)

The values presented in Table 6 were calculated after discarding the
first 2 hours of data for each test as time for convergence. The
3-dimensional RMS error for PPP using MADOCA-LEX solutions was 0.145m,
which is about 18% larger than the case where IGS-RT products were used.
Figure 8 shows the time series for the first 6 hour the kinematic PPP
tests.
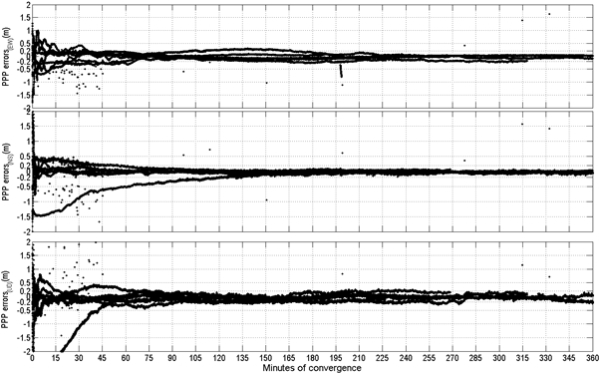
Figure 8. Performance of kinematic PPP using MADOCA-LEX products.
RMS positioning errors after 2 hours of convergence E/N/U:
0.081cm/0.036cm/0.115cm
As is shown in Figure 8 the convergence time seemed to be over 2
hours for some cases. Table 7 presents the RMS errors at different
convergence times. The values in the tables were calculated using
measurements corresponding to a 10 minutes period just after the
convergence time.
Table 7. Positioning errors for
kinematic PPP using MADOCA-LEX products
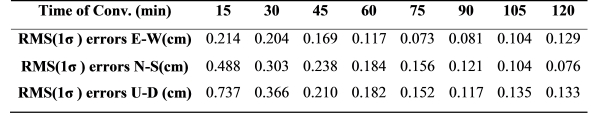
The 3-dimensional RMS errors 120 to 130 minutes after the start of
each test are 0.200m, 38% higher than the RMS errors calculated from 120
minutes to the end of each test. For comparison, the RMS error values
for different convergence times are shown in Table 8. Here also can be
seen that 120 minutes are not enough to full convergence, the
3-dimensional RMS errors being 26% higher than the final value.
Table 8. Positioning errors for
kinematic PPP using IGS-RT (CLK11) products
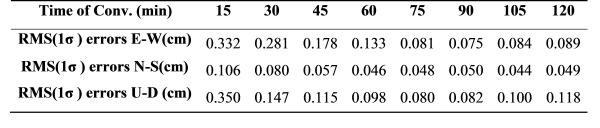
It can also be seen from Tables 7 and 8 that the convergence time
decreases after 90 minutes, with less than 10% difference in
3-dimensional RMS values between 90 and 120 minutes of convergence.
4.2 Vehicle Tests
The kinematic vehicle test described in this section was performed
from 21:15 UTC to 22:20 UTC on October 23, 2013 in Centennial Park,
Sydney, Australia (approximate coordinates 33°53’S, 151°13’E). The GNSS
and LEX antennas were mounted on the roof of a car connected to
receivers placed inside the car. As a reference for this vehicle test,
network RTK positions were obtained using a Leica GX1200 receiver
connected to the CORSnet network (ie. RTK solutions). The GNSS receiver
used in this test, a Novatel OEM-04, was connected through a splitter to
the Leica receiver’s antenna. Figure 9 shows the ground track and
measurement conditions for the vehicle experiment. A period of
convergence of approximately180 minutes was taken before starting the
vehicle test. Figure 10 shows the time series for the positioning errors
for the vehicle test and the period of convergence.

Figure 9. Ground track of vehicle tests performed on Sydney.
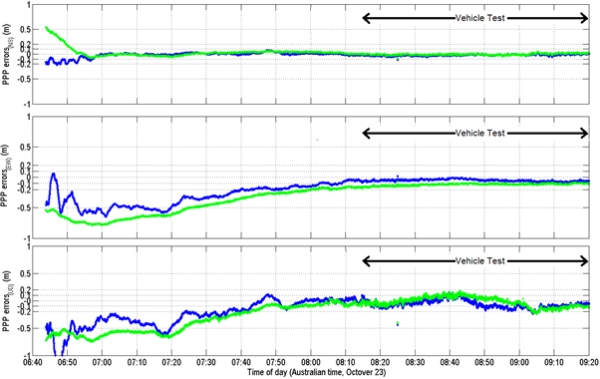
Figure 10. RMS errors for of vehicle tests. Kinemtic PPP using
MADOCA-LEX products (Blue) E/N/U: 0.050m/0.027m/0.098m. Kinemtic PPP
using IGS-RT products CLK11 (Green): 0.088m/0.039m/ 0.073m
The mean, STD and RMS error of kinematic PPP using MADOCA-LEX
corrections are presented in Table 9. The position errors were computed
with respect to the network RTK solutions obtained from the Leica
receiver. Equivalent results for kinematic PPP using IGS-RT products are
also presented for comparison.
Table 9. RMS errors for
real-time PPP in vehicle solutions

The 3-dimensional RMS error for PPP using MADOCA-LEX solutions was
0.113m, and 0.121m using IGS-RT products. In this case the errors for
kinematic PPP using IGS-RT products are higher than those obtained using
MADOCA-LEX. Although the exact reason governing this performance
difference needs to be studied further, the difference in this case may
be due to the terrestrial data networks.
In order to illustrate this, a third set of results for real-time PPP
are presented in Table 9. The MADOCA-NTRIP products used for this third
solution are the same RTCM3.2 messages packaged in the MADOCA-LEX
messages. But were transmitted via the terrestrial communication
network. The 3-dimentional RMS error of this third solution is 0.155m,
about 28% higher than the IGS-RT solutions.
5. CONCLUSIONS
The Japanese QZSS system is a GNSS augmentation system that aims to
provide enhanced performance of satellite based positioning over East
Asia and Oceania. One of the signals transmitted by the first satellite
of the system is the LEX signal. The LEX signal is designed to provide
enhanced accuracy of GNSS based positioning. The services provided by
the LEX signal are expected to cover most of the East Asia and Oceania
region by 2018.
One of the services being tested in the LEX signal is the
transmission of MADOCA-LEX messages, which contain precise orbit and
clock corrections that allow real-time PPP over its coverage area. In
the present paper the performance of real-time PPP using MADOCA-LEX
messages was tested in both fixed point and vehicle tests and compared
with real-time PPP using the IGS-RT streams.
For the static PPP, a 3-dimentional accuracy of 0.041m can be
expected after 2 hours or more of convergence. This accuracy is
comparable with those obtained in with IGS-RT messages (0.033m). Also,
these accuracies are close to those obtainable from post processed PPP
algorithms such as NRCAN’s PPP services (reported to be about 2cm).
For kinematic PPP, a 3-dimentional accuracy of 0.200m can be expected
after 90 minutes of convergence and 0.145m after a few hours. These
decimeter level accuracies were obtained both in fixed point and vehicle
tests up to speed of about 10m/s. These results are also similar to
those obtained from using IGS-RT products.
It is to note however that both these tests were performed under open
sky conditions, the performance of PPP using MADOCA-LEX products under
more urban environments as well as the effects of the latency induced by
the terrestrial or satellite communication links used is currently under
investigation.
Research efforts aiming to further enhance the capabilities of the
LEX signal to provide high accuracy positioning is being undertaken by
JAXA. Also, research in the usage of the LEX signal for real-time PPP is
being performed as part of CRCSI Project 1.11. As part of that effort, a
communication link between RMIT and JAXA, intended to transmit
correction messages generated in Australia, was tested on November 17 of
2013.
ACKNOWLEDGEMENTS
This research is funded through the Australian Cooperative Research
Centre for Spatial Information (CRCSI Project 1.11) and is a
collaborative project between the CRCSI and the Japan Aerospace
Exploration Agency (JAXA). The CRCSI research consortium consists of
RMIT University, University of New South Wales, Victoria Department of
Environment and Primary Industry, New South Wales Land and Property
Information and Geoscience Australia. The authors would also like to
thank JAXA for providing the GNSS and LEX receivers for testing. The
effort of the IGS to provide precise satellite orbits and clocks is
gratefully acknowledged.
REFERENCES
Sawamura T., Takahashi T., Moriguchi T., Ohara K., Noda H., Kogure
S., Kishimoto M. (2012): Performance of QZSS (Quasi-Zenith Satellite
System) & L-Band Navigation Payload, Proceedings of the 2012
International Technical Meeting of The Institute of Navigation, Newport
Beach, CA, January 2012, 1228-1254.
Saito M., Sato Y., Miya M., Shima M., Omura Y., Takiguchi J., Asari
K. (2011): Centimeter-class Augmentation System Utilizing Quasi-Zenith
Satellite, Proceedings of the 24th International Technical Meeting of
The Satellite Division of the Institute of Navigation, Portland, OR,
September 2011, pp. 1243-1253.
Clark S. (2013): Japan to build fleet of navigation satellites.
Spaceflight Now.
http://www.spaceflightnow.com/news/n1304/04qzss/#.UYAeCbUziGH
(accessed April 2013).
Japan Aerospace Exploration Agency (2013): Interface Specification
for QZSS (version 1.5).
http://qz-vision.jaxa.jp/USE/is-qzss/DOCS/IS-QZSS_15D_E.pdf
Kanzaki M., Noguchi N. (2011): Experimental Results of LEX
Corrections Using Farming Machine, Sixth Meeting of the International
Committee on Global Navigation Satellite Systems (ICG), Tokyo, Japan,
September 2011.
Choy S., Harima K., Li Y., Wakabayashi Y., Tateshita H., Kogure S.,
Rizos C. (2013): Real-Time Precise Point Positioning Utilising the
Japanese Quasi-Zenith Satellite System (QZSS) LEX Corrections.
Proceeding of the IGNSS Symposium. Gold Coast, Australia, July 2013,
Paper 93
Takasu T. and Yasuda A. (2009): Development of the low-cost RTK-GPS
receiver with an open source program package RTKLIB, International
Symposium on GPS/GNSS, Jeju, Korea, November 2009.
BIOGRAPHICAL NOTES
Ken Harima obtained his Bachelor’s degree in Elctronic
Engineering from Universidad Simon Bolivar, Caracas Venezuela, in 2002.
He obtained PhD degree from the University of Tokyo in 2012.He is
currently a research fellow at the School of Mathematical and Geospatial
Sciences in RMIT University. He research interest are GNSS receivers and
SBAS systems.
Suelynn Choy completed her PhD in 2009 in the area of GPS
Precise Point Positioning (PPP) at RMIT University, Australia. Since
then, she works as a full-time academic staff at the School of
Mathematical and Geospatial Sciences in RMIT University. She teaches
land surveying, geodesy, and GNSS navigation to undergraduate and
graduate students. Her current research interests are in the areas of
multi-GNSS PPP and using GNSS for atmospheric and ground remote sensing.
Suelynn is the co-chair of the IAG (International Association of
Geodesy) Working Group 4.5.2: PPP and Network RTK under Sub-Commission
4.5: High Precision GNSS Algorithms and Applications
Yong Li is a senior research fellow at the Satellite
Navigation and Positioning (SNAP) Lab within the School of Surveying &
Spatial Information Systems, the University of New South Wales (UNSW),
Sydney, Australia. His current interests include integration of GPS,
INS, and pseudolite (Locata), attitude determination, GPS receiver
technique, FPGA technology, and its application to navigation, and
optimal estimation/filtering theory and applications.
Chris Rizos is a graduate of the School of Surveying, The
University of New South Wales(UNSW), Sydney, Australia; obtaining a
Bachelor of Surveying in 1975, and a Doctor of Philosophy in 1980 in
Satellite Geodesy. He is currently a member of the School of Civil &
Environmental Engineering, UNSW. Chris research experitise is high
precision applications of GPS. He is a member of a Fellow of the
Australian Institute of Navigation, a Fellow of the U.S. Institute of
Navigation, a Fellow of the International Association of Geodesy (IAG),
an honorary professor of Wuhan University (P.R. China), and is currently
President of the IAG (2011-2015).
CONTACTS
Dr. Ken Harima.
Royal Melbourne Institute of Technology (RMIT) University
GPO Box 2476V, Melbourne, Victoria 3001, Australia
Tel: +61 3 9925 3775
Email: ken.harima@rmit.edu.au
Dr. Suelynn Choy
Royal Melbourne Institute of Technology (RMIT) University
GPO Box 2476V, Melbourne, Victoria 3001, Australia.
Tel: +61 3 9925 2650
Fax: +61 3 9663 2517
Email:
suelynn.choy@rmit.edu.au
Dr. Chris Rizos
The University of New South Wales
UNSW Sydney NSW 2052 AUSTRALIA
Tel: +61 2 93854205
Fax: +61 2 9385 6139
Email: c.rizos@unsw.edu.au
Dr. Yong Li
The University of New South Wales
UNSW Sydney NSW 2052 AUSTRALIA
Tel: +61 2 9385 4173
Fax: +61 2 9385 6139
Email: yong.li@unsw.edu.au
Ms. Yaka Wakabayashi
Japan Aerospace Exploration Agency
Tsukuba Space Center, 2-1-1 Sengen, Tsukuba, Ibaraki, Japan
Tel : +81 50 3362-3558
Fax : +81 29 868-5987
Email:
wakabayashi.yaka@jaxa.jp
 |






















